
A motor generally drives a load (Machines) through some transmission system. While motor always rotates, the load may rotate or undergo a translational motion
Load speed may be different from that of motor, and if the load has many parts, their speed may be different and while some parts rotate others may go through a translational motion.
Equivalent rotational system of motor and load is shown in the figure.
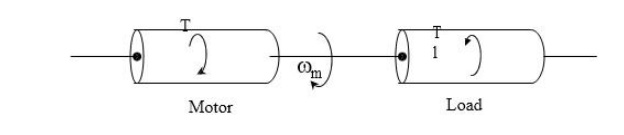
J = Moment of inertia of motor load system referred to the motor shaft kg / m2
ωm = Instantaneous angular velocity of motor shaft, rad/sec.
T = Instantaneous value of developed motor torque, N-m
Tl = Instantaneous value of load torque, referred to the motor shaft N-m
Load torque includes friction and wind age torque of motor. Motor-load system shown in figure can be described by the following fundamental torque equation.

Equation (1) is applicable to variable inertia drives such as mine winders, reel drives, Industrial robots.
For drives with constant inertia
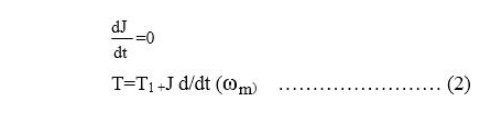
Equation (2) shows that torque developed by motor