1. Construction
The stator of the BLPM dc motor is made up of silicon steel stampings with slots in its interior surface. These slots accommodate either a closed or opened distributed armature winding usually it is closed. This winding is to be wound for a specified number of poles. This winding is suitably connected to a dc supply through a power electronic switching circuitry (named as electronic commutator).
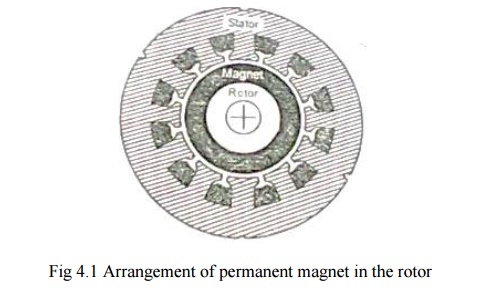
Rotor is made of forged steel. Rotor accommodates permanent magnet. Number of poles of the rotor is the same as that of the stator. The rotor shaft carries a rotor position sensor. This position sensor provides information about the position of the shaft at any instant to the controller which sends suitable signals to the electronic commutator.
2. Merits and Demerits
Merits
v There is no field winding. Therefore there is no field cu loss.
v The length of the motor is less as there is no mechanical commutator.
v Size of the motor becomes less.
v It is possible to nave very high speeds.
v It is self-starting motor. Speed can be controlled.
v Motor can be operated in hazardous atmospheric condition.
v Efficiency is better.
Demerits
v Field cannot be controlled.
v Power rating is restricted because of the maximum available size of permanent magnets.
v A rotor position sensor is required.
v A power electronic switch circuitry is required.
3. Comparison of brushless dc motor relative to induction motor drives
v In the same frame, for same cooling, the brushless PM motor will have better efficiency and p.f and therefore greater output. The difference may be in the order of 20 – 50% which is higher.
v Power electronic converter required is similar in topology to the PWM inverters used in induction motor drives.
v In case of induction motor, operation in the weakening mode is easily achieved providing a constant power capability at high speed which is difficult in BLPM dc motor.
v PM excitation is viable only in smaller motors usually well below 20 kw also subject to speed constraints, In large motors PM excitation does not make sense due to weight and cost.
4. Commutator and brushes arrangement
Because of the hetropolar magnetic field in the air gap of dc machine the emf induced in the armature conductors is alternating in nature. This emf is available across brushes as unidirectional emf because of commutator and brushes arrangement.
The dc current passing through the brushes is so distributed in the armature winding that unidirectional torque is developed in armature conductor.
A dc current passing through the brushes because of commutator and brushes action, always sets up a mmf whose axis is in quadrature with the main field axis, irrespective of the speed of the armature.
5. Construction of Mechanical Commutator
Commutator Segment
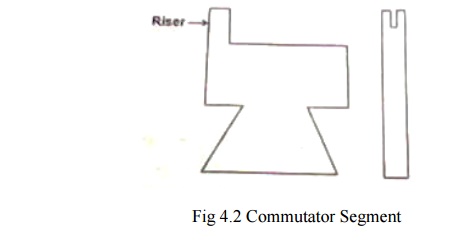
Commutator is made up of specially shaped commutator segments made up of copper. These segments are separated by thin mica sheets (ie) Insulation of similar shape. The commutator segments are tapered such that when assembled they form a cylinder.
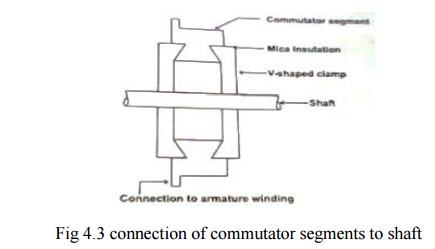
These segments are mechanically fixed to the shaft using V – shaped circular steel clamps, but are isolated electrically from the shaft using suitable insulation between the clamps and the segment.
6. Mechanical Commutator and Brushes Arrangement
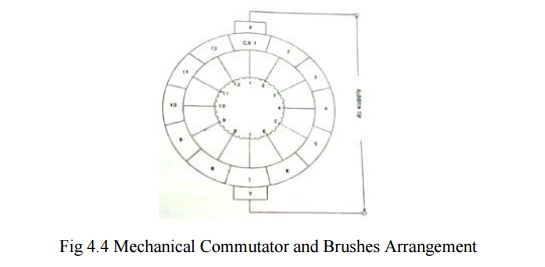
It represents a case with 2poles and 12 commutator segments.
To start with the brush X contacts with CSI and brush Y with 7.A dc supply is connected across the brushes X and Y. The dc current I passes through brush X,CSI,tapping
1,tapping 7and brush Y. There are two armature parallel paths between tapping‘s 1 and 7.the current passing through the armature winding aets up a magneto motive force whose axis is along the axes of tapping 7 and 1 of the brush axes Y and X.
Allow the armature to rotate by an angle in a counter clockwise direction. Then the brush X contacts CS2 and the tapping‘s a and the brush Y. Contact CS8 and tapping 8.The dc current passes through the tapping‘s 2 and 8 there are two parallel paths.
(i) 2 – 3 – 4 – 5 – 6 – 7 – 8
(ii) 2 – 1 – 12 – 11 – 10 – 9 – 8
Now the mmf set up by the armature winding is form tapping 8 to 2 along the brush axis YX Thus the armature mmf direction is always along the brush axis YX, even though the current distribution in the armature winding gets altered.
In a normal dc machine brushes are kept in the interpolar axis. Therfore, the axis of the armature mmf makes an angle 90˚elec with the main field axis.
The function of commutator and brushes arrangement in a conventional dc machine is to set up an armature mmf always in quadrature with the main field mmf respectively of the speed of rotation of the rotor.
7. Electronic commutator
The armature winding which is in the stator has 12 tapping‘s. each tapping is connected to the positive of the dc supply node and through 12 switches designated as S1 ,S2,….S12 and negative of the supply at node Y through switches S‘1,S‘2,…….S‘12.
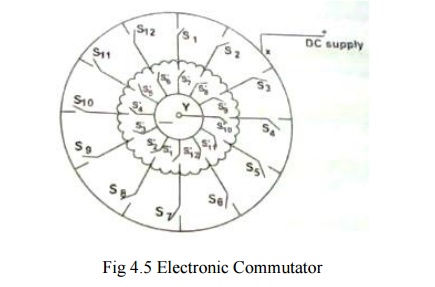
When S1 and S‘1 are closed the others are in open position, the dc supply is given to the trappings 1 and 7.there are two armature parallel path.
(i) 1 – 2 – 3 – 4 – 5 – 6 – 7
(ii) 1 – 12 – 11 – 10 – 9 – 8 – 7
They set up armature mmf along the axis 7 to 1.
After a small interval S1 and S‘1 are kept open and S2 and S‘2 are closed. Then dc current passes from tapping 2 to 8 sets up mmf in the direction 8 – 2.
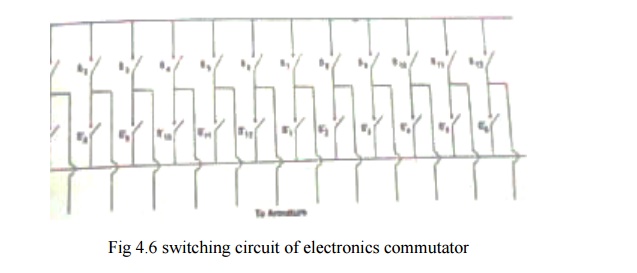
Thus by operating the switch in a sequential manner it is possible to get a revolving mmf in the air gap. The switches S1 to S12 and S‘1 to S‘12 can be replaced by power electronic switching devices such as SCR‘s MOSFET‘s IGBT‘s, power transistor etc.
When SCR‘s are used suitable commutating circuit should be included. Depending upon the type of forced commutated employed, each switch requires on or two SCRs and other commutating devices. As number of devices is increased, the circuit becomes cumbersome.
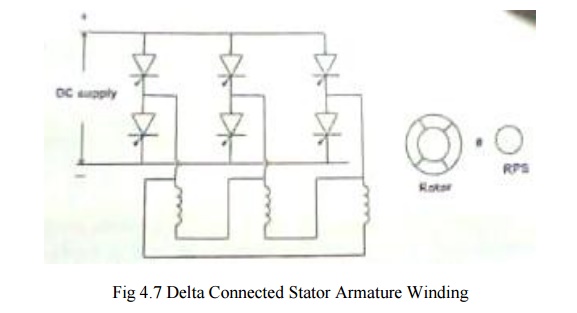
For normal electronic commutator, usually six switching devices are employed. Then the winding should have three tapping‘s. Therefore the winding can be connected either in star or in delta.
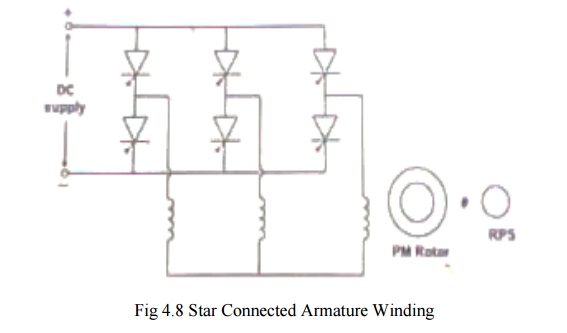
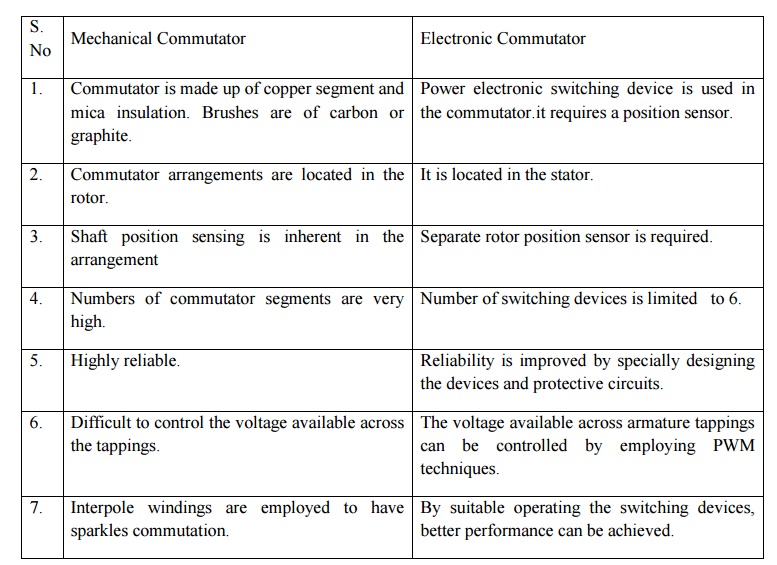
8. Comparison between mechanical Commutator and brushes and Electronic Commutator